Design Process
Define a Problem

Goals
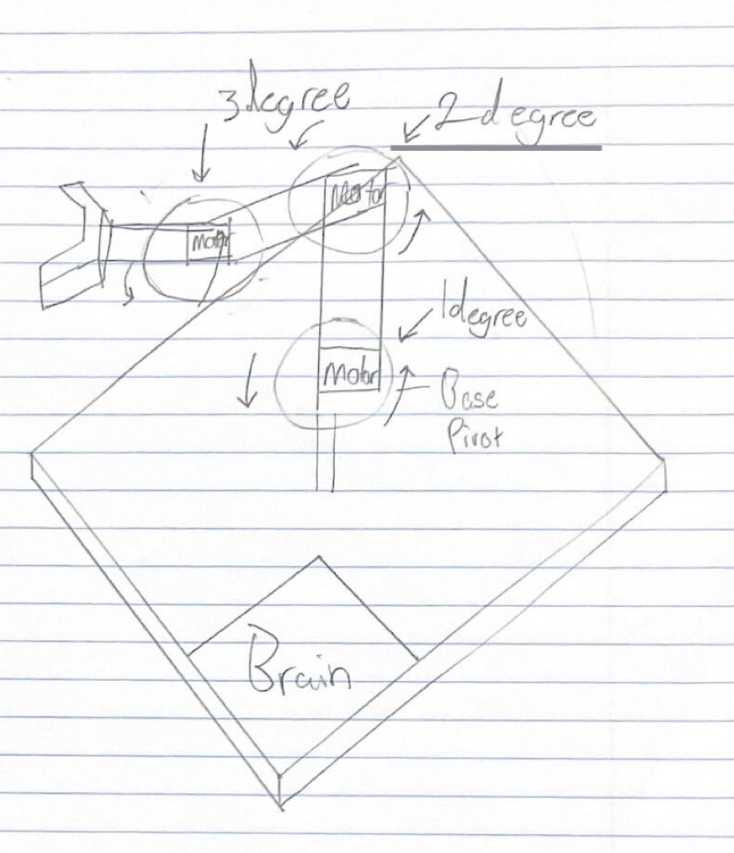
* Create a robotic arm that has 3 independent axis of rotation
* Make the robotic arm as stable as possible
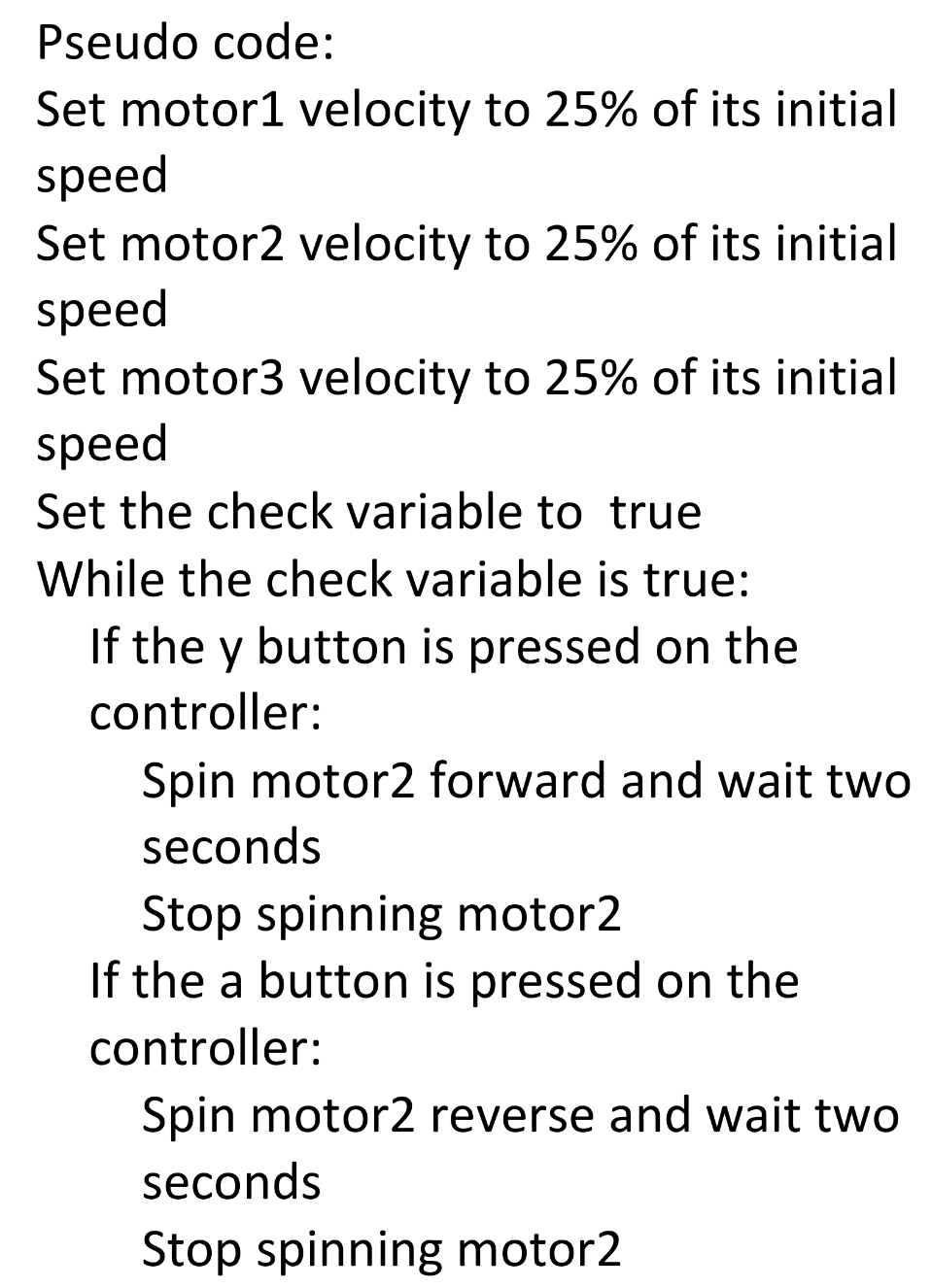
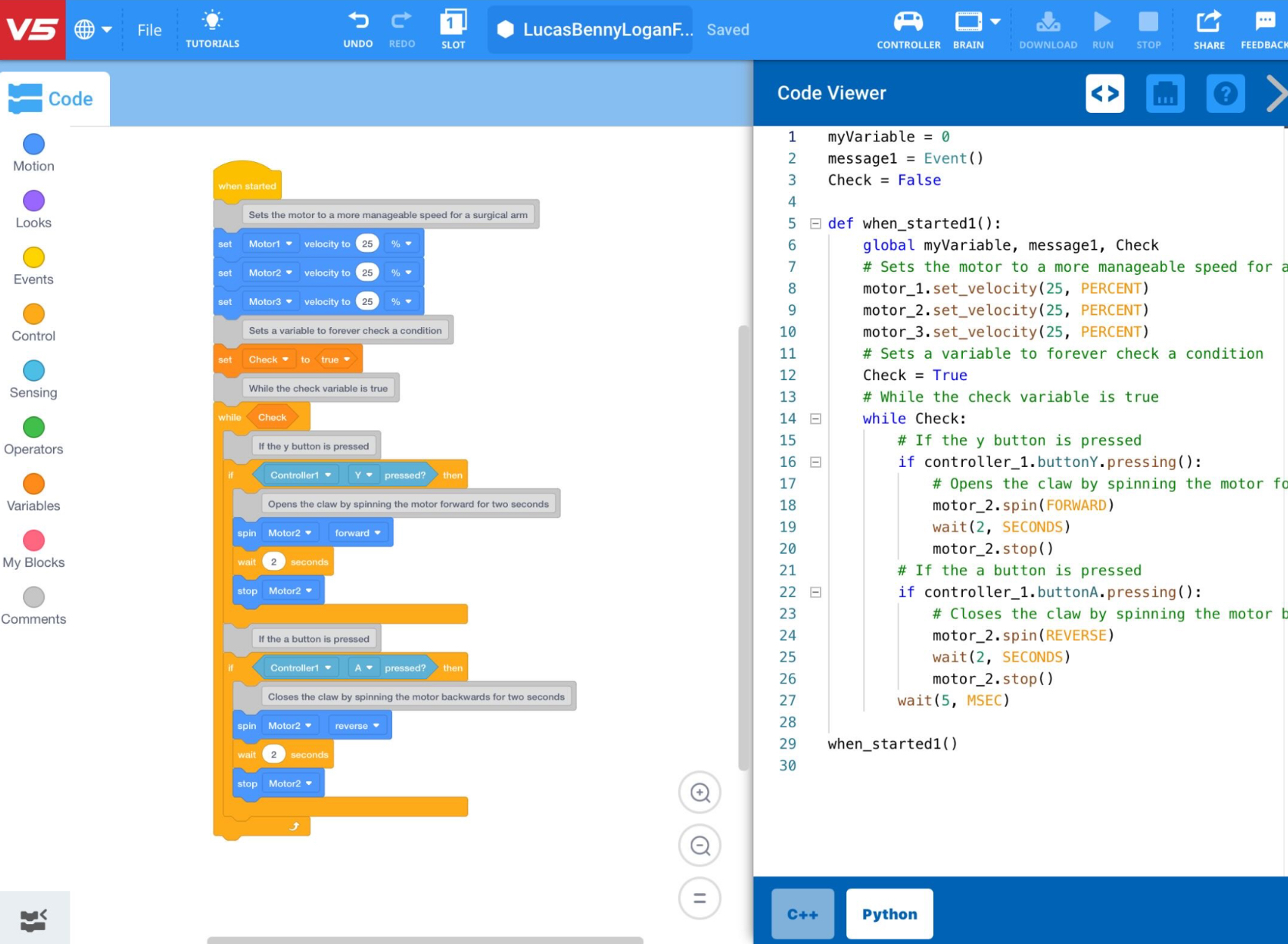
* Program the robot so the motors move very slowly, guaraneeing it is precise and accurate, which is needed for a robotic arm.
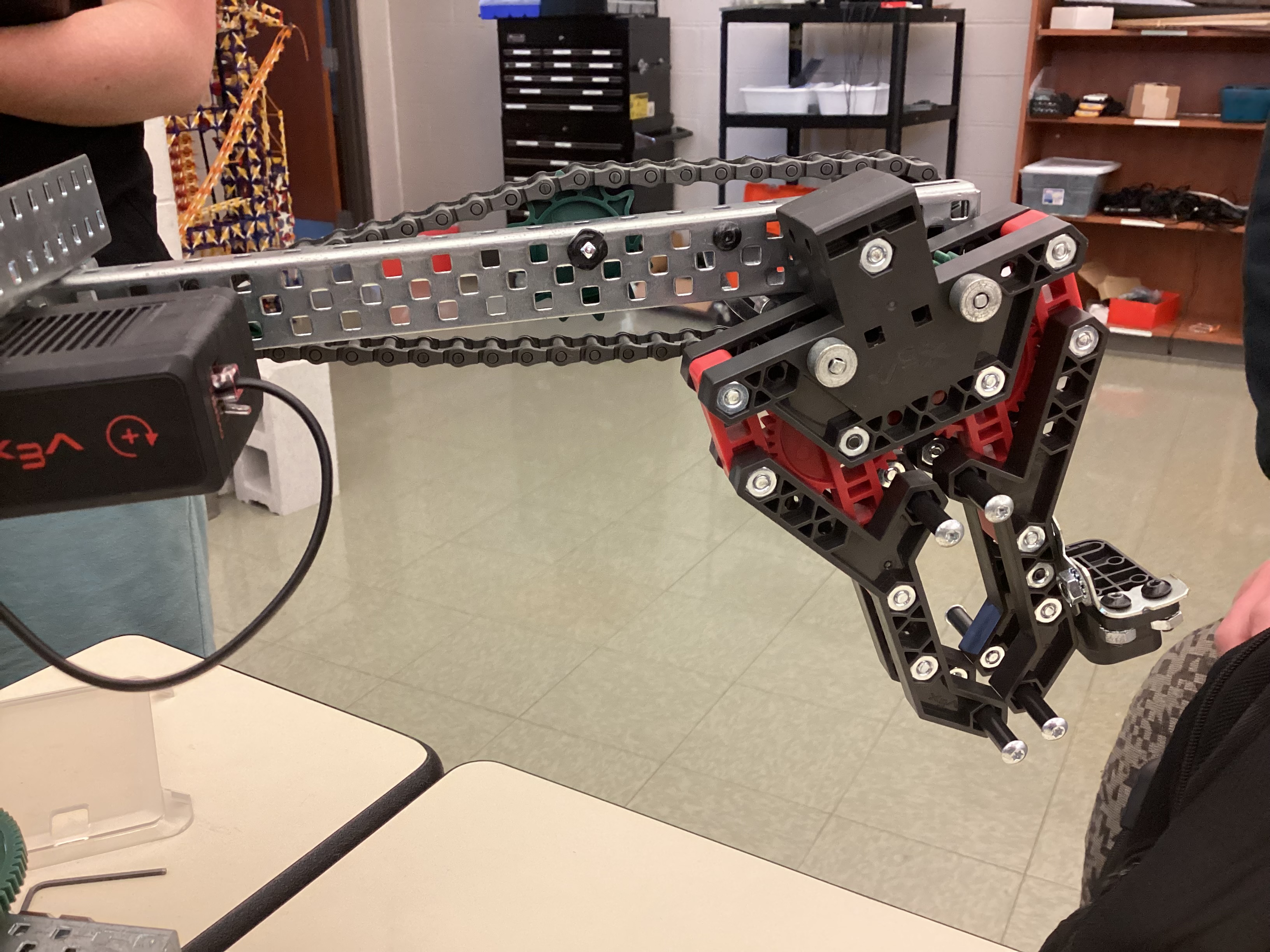
* Add a claw to the robot so it can pick up objects.
Design Brief
Owner: B.L.F.L.
Client/Company: John Doe Surgeries
About client/company: This surgeon-based hospital handles most surgeries in the country. They need capable people to build a robotic arm that will act as a third arm for surgeions without attendants.
Project goals: Create a claw that can pick up things to move objects out of the surgeon's path. It will have three degrees of freedom and can handle precise movements.
Target Audience: Surgeons or people in the medical field who need an "extra hand".
Generate Concepts
Decision Matrix:
| Idea | Strength | Stability | Weight | Freedom to rotate | Total |
| Worm Gear Arm | 1 | 2 | 2 | 1 | 6 |
| Only Geared Arm | 3 | 3 | 3 | 2 | 11 |
| All motors are at the bottom, motion is transferred | 2 | 1 | 1 | 3 | 7 |
Key: Scored 1 to 3, 1 is best and 3 is worst
Develop a Solution
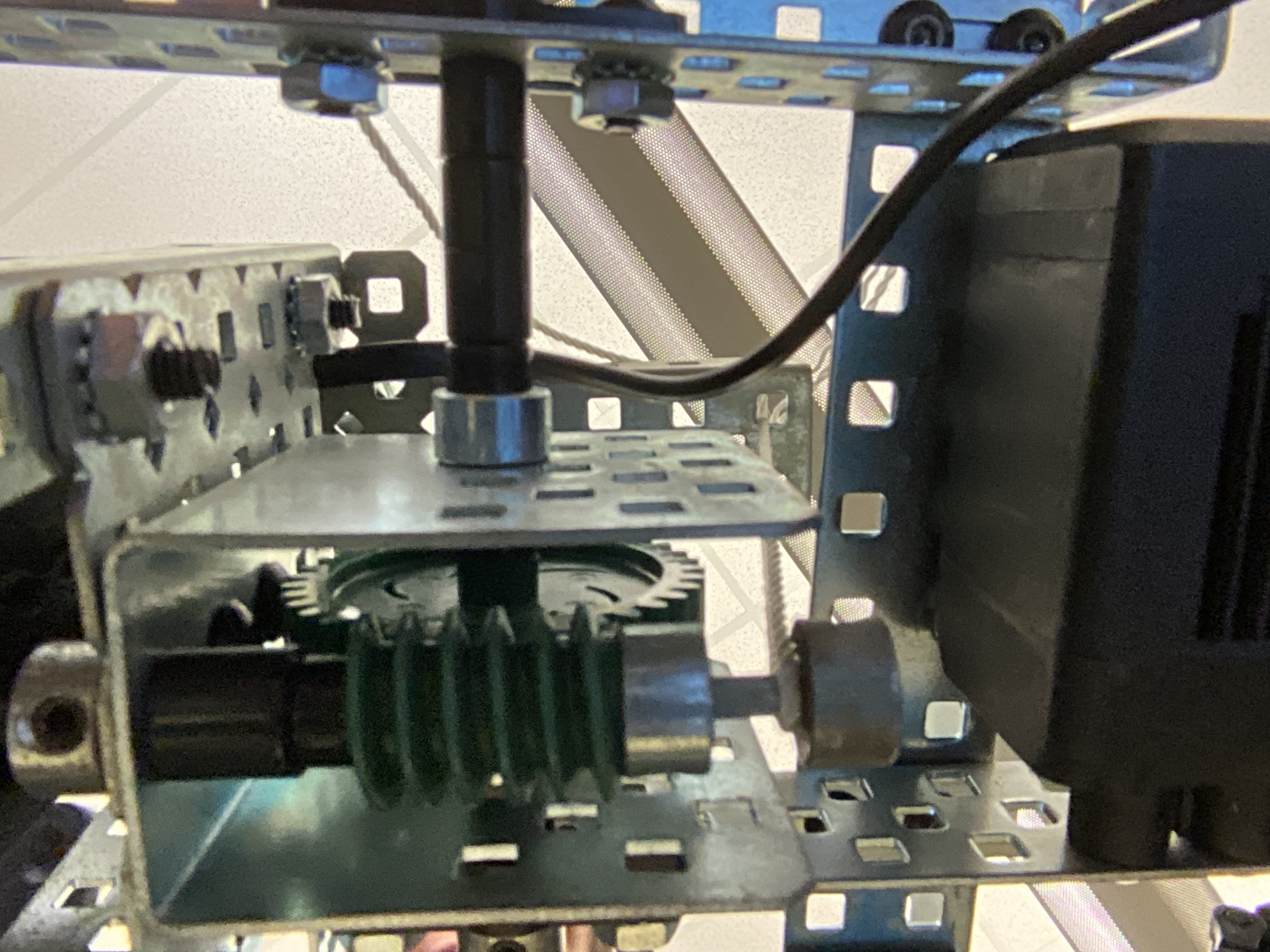
In the beginning of this project, we brainstormed different ideas. We decided that using a worm gear
for the vertically rotating arm would be best as it would have a high mechanical advantage.
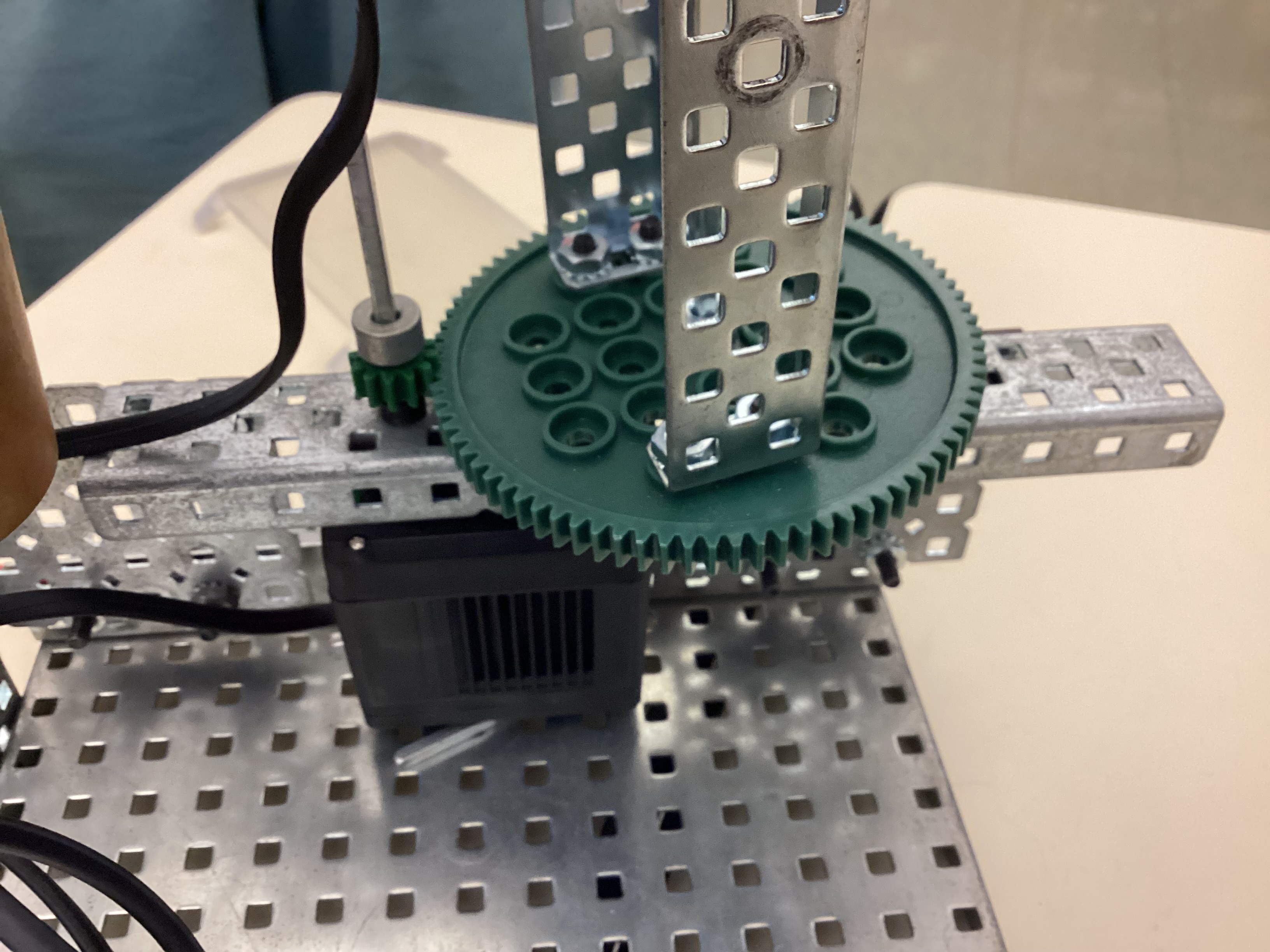
We started with a large, stable base. To this base, we mounted the bottom motor using an L-channel.
After this, we mounted the uppoer portion onto the gear that was controlled by the bottom motor.
Next, we got stuck on the worm gear, which was quite hard to reinforce. The other gear kept slipping, but we finally figured it out.
We added the main arm with the claw, but it was hard to lift.
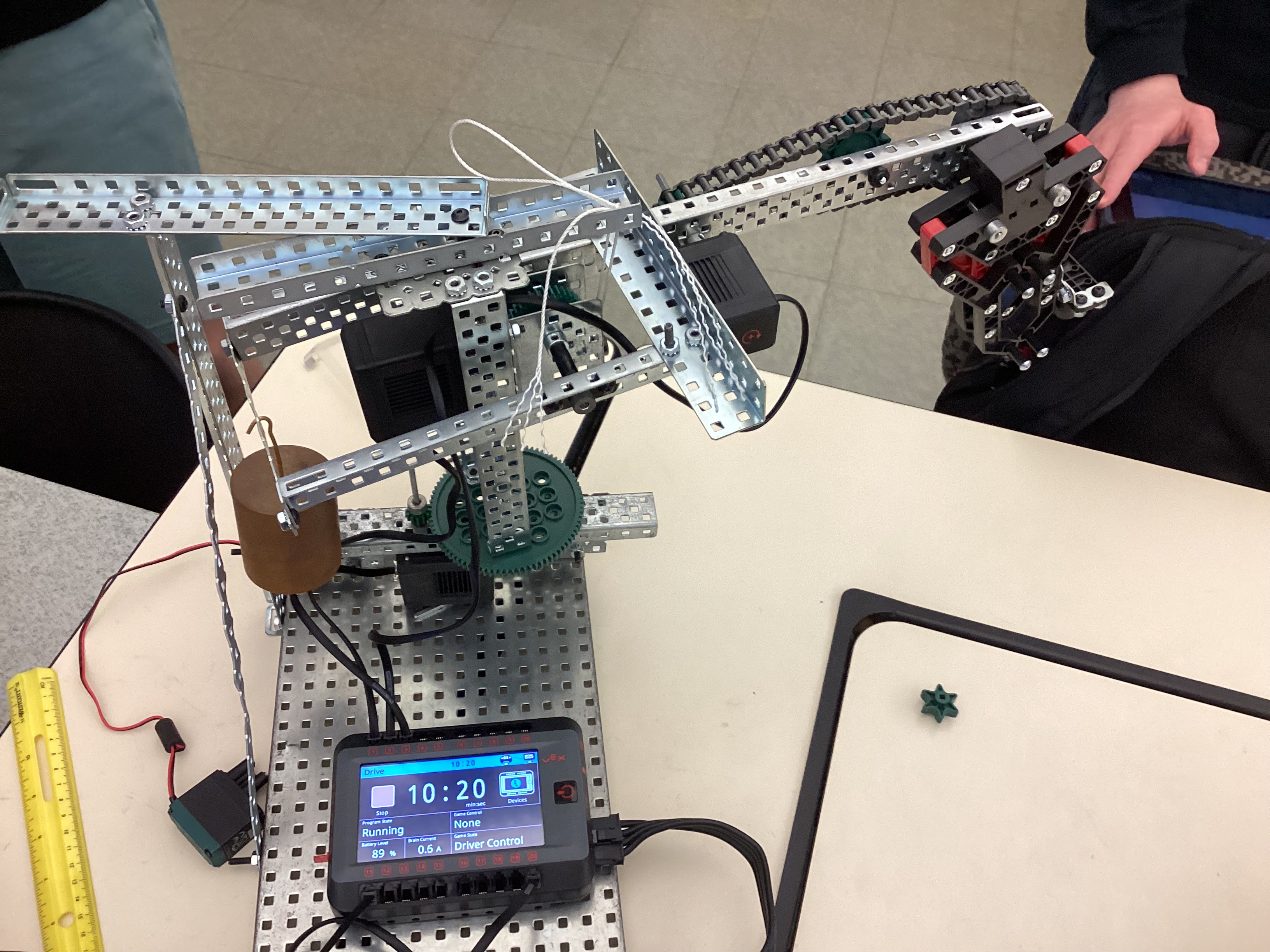
To mitigate this issue, we added a counterweight of 1 kilogram to reduce the strain on the motor.
We also added a few other supports to ensure that the entire structure was stable.
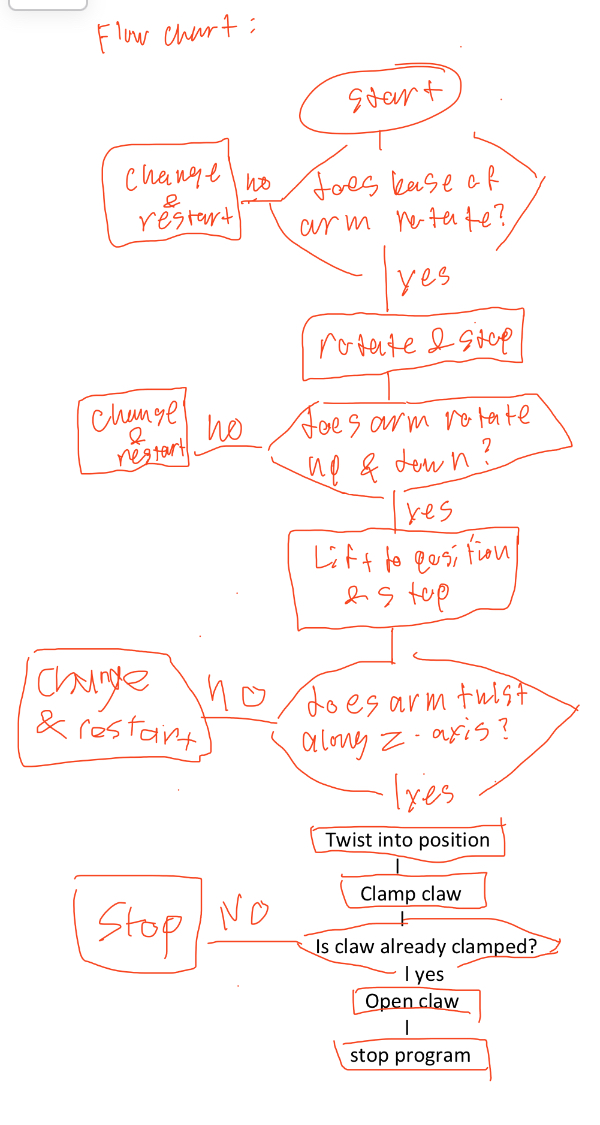
For the code, we started with basic motions.
After we got the main axis motions, we fine-tuned the values to suit our needs.
This allowed us to pick up a ping-pong ball.
Construct and Test Prototype
Evaluate Solution
We had to use a worm gear instead of a regular gear in order to provide more torque and a higher mechanical advantage to the arm. Additionally, we used a counterweight of 1 kilogram to offset the weight of the robotic arm so the worm gear experienced less stress and strain. The robot was originally unstable, so we added supports in the form of a metal strip in a triangle to provide additional support. We also added a support gantry to the back of the robotic arm to support the arm from the top. Since we used sprockets to drive the claw, we had to take links of the chain off in order to achieve the desired tension.
Present Solution
Conclusion
In this project, we learned how to program a VEX controller to precisely set the position of the motors.
We used if conditional statements to check if buttons on the controller were pressed or changed.
The entire program ran inside a forever or "while" loop to make it repeat and always
query the controller input to change the positions of the motors.
I enjoyed the challenge that the hardware offered as it was hard to keep everything stable and working.
The hardest part of this project was ensuring the main gear was aligned properly on top of the worm gear.
In order to further improve the design, a tolerance for stability should be added to ensure it is adequate for surgery.
Also, the robotic arm should have a requirement for the grip strength/force of the claw, which would ensure it could lift objects reliably.